11.1. Runmodes
Suricata consists of several 'building blocks' called threads, thread-modules and queues. A thread is like a process that runs on a computer. Suricata is multi-threaded, so multiple threads are active at once. A thread-module is a part of a functionality. One module is for example for decoding a packet, another is the detect-module and another one the output-module. A packet can be processed by more than one thread. The packet will then be passed on to the next thread through a queue. Packets will be processed by one thread at a time, but there can be multiple packets being processed at a time by the engine (see Max-pending-packets). A thread can have one or more thread-modules. If they have more modules, they can only be active one a a time. The way threads, modules and queues are arranged together is called the "Runmode".
11.1.1. Different runmodes
You can choose a runmode out of several predefined runmodes. The
command line option --list-runmodes shows all available runmodes. All
runmodes have a name: single, workers, autofp.
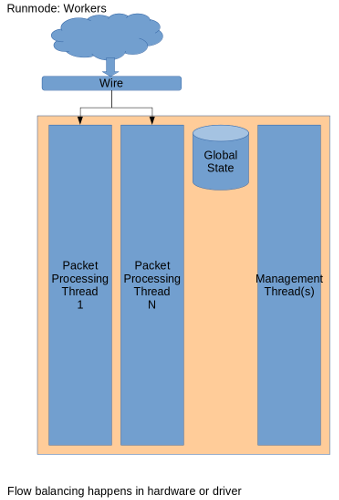
Generally, the workers runmode performs the best. In this mode the
NIC/driver makes sure packets are properly balanced over Suricata's
processing threads. Each packet processing thread then contains the
full packet pipeline.
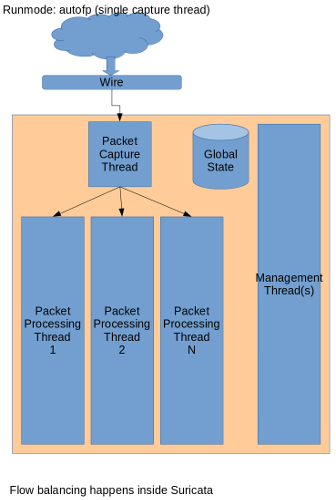
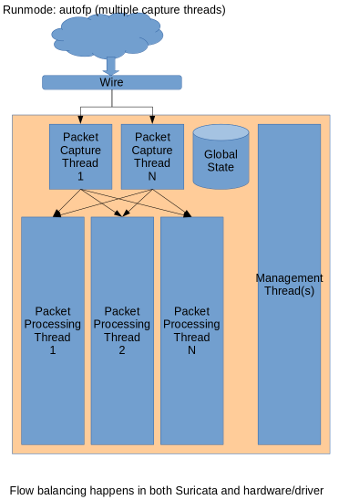
For processing PCAP files, or in case of certain IPS setups (like NFQ),
autofp is used. Here there are one or more capture threads, that
capture the packet and do the packet decoding, after which it is passed
on to the flow worker threads.
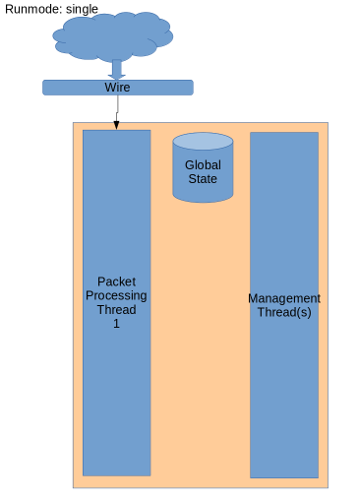
Finally, the single runmode is the same as the workers mode,
however there is only a single packet processing thread. This is mostly
useful during development.
For more information about the command line options concerning the runmode, see Command Line Options.
11.1.2. Load balancing
Suricata may use different ways to load balance the packets to process between different threads with the configuration option autofp-scheduler.
The default value is hash, which means the packet is assigned to threads using the 5-7 tuple hash, which is also used anyways to store the flows in memory.
This option can also be set to - ippair : packets are assigned to threads using addresses only. - ftp-hash : same as hash except for flows that may be ftp or ftp-data so that these flows get processed by the same thread. Like so, there is no concurrency issue in recognizing ftp-data flows due to processing them before the ftp flow got processed. In case of such a flow, a variant of the hash is used.